Abstract
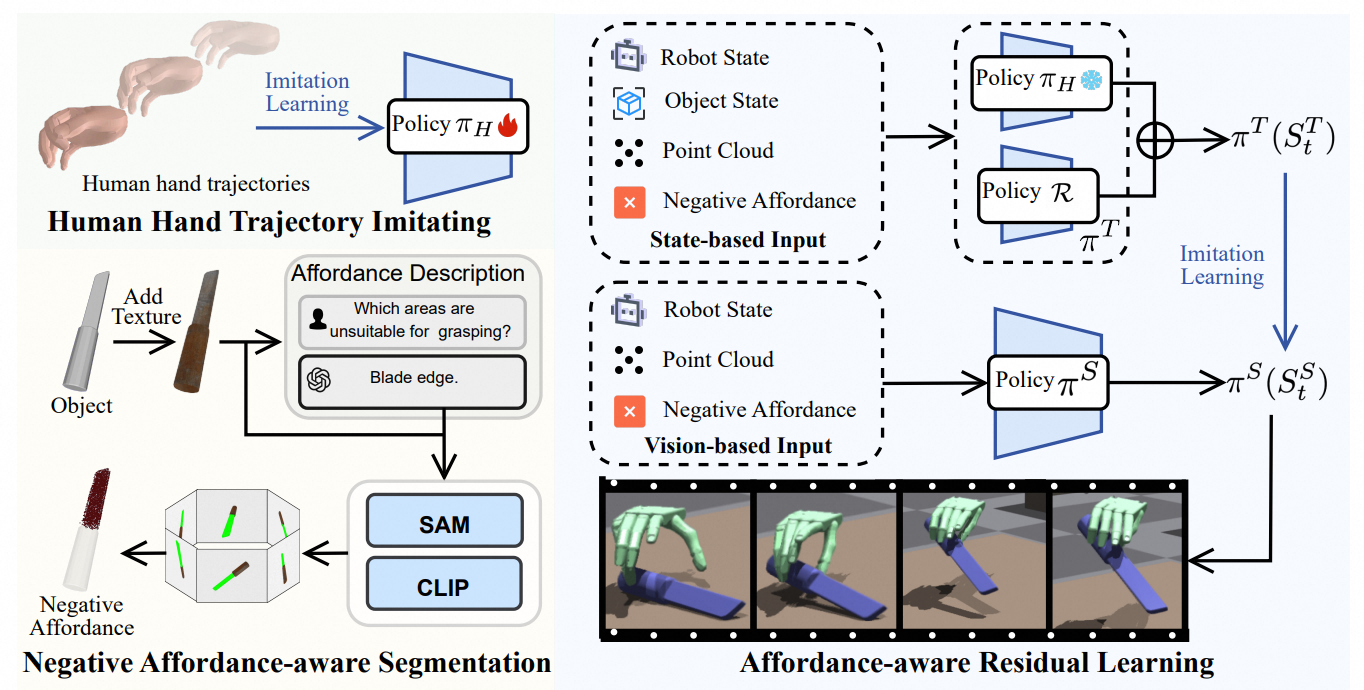
A dexterous hand capable of generalizable grasping objects is fundamental for the development of general-purpose embodied AI. However, previous methods focus narrowly on low-level grasp stability metrics, neglecting affordanceaware positioning and human-like poses which are crucial for downstream manipulation. To address these limitations, we propose AffordDex, a novel framework with two-stage training that learns a universal grasping policy with an inherent understanding of both motion priors and object affordances. In the first stage, a trajectory imitator is pretrained on a large corpus of human hand motions to instill a strong prior for natural movement. In the second stage, a residual module is trained to adapt these general human-like motions to specific object instances. This refinement is critically guided by two components: our Negative Affordance-aware Segmentation (NAA) module, which identifies functionally inappropriate contact regions, and a privileged teacher-student distillation process that ensures the final vision-based policy is highly successful. Extensive experiments demonstrate that AffordDex not only achieves universal dexterous grasping but also remains remarkably humanlike in posture and functionally appropriate in contact location. As a result, AffordDex significantly outperforms stateof-the-art baselines across seen objects, unseen instances, and even entirely novel categories.